Ingestible "origami" robot could help lessen need for invasive surgeries

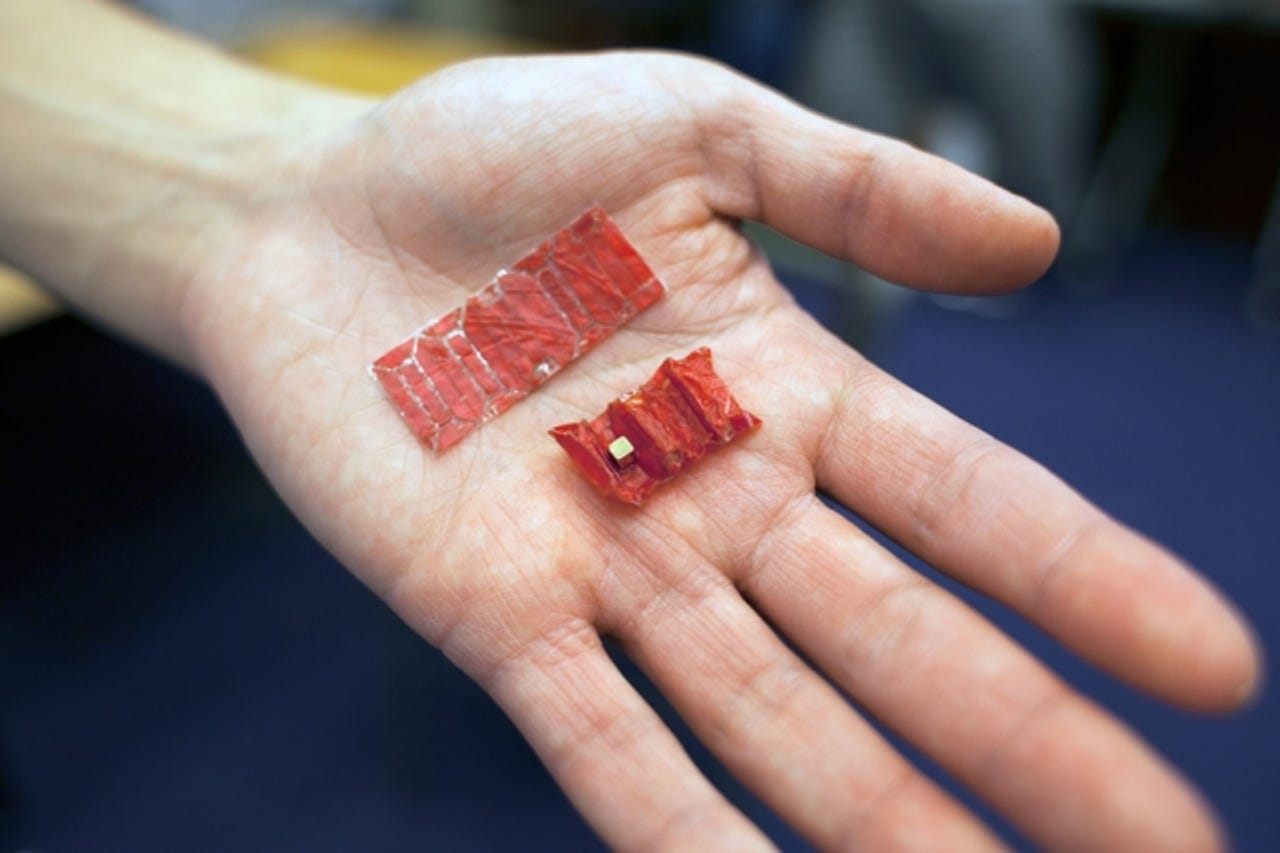
This ingestible "origami" robot was developed by a team of researchers from MIT, the University of Sheffield and the Tokyo Institute of Technology,
Every year, there are 3,500 reported cases of swallowed button batteries. The tiny batteries can move through the digestive system normally. However, if one stays in a person's body too long, its electrical current can burn through tissue, leading to serious harm or even death. Last year, the Today show reported on one little boy who had to endure 65 surgeries after swallowing a button battery.
Thanks to a new miniature, ingestible robot a team of researchers has developed, children who swallow batteries may be able to avoid such invasive, high-risk surgeries. A child could theoretically swallow a capsule containing the tiny "origami" robot, and the capsule would dissolve, leaving the robot to unfold itself. Steered by external magnetic fields, the robot could then be directed to attach to the battery and move it through the digestive system.
The team of researchers, from MIT, the University of Sheffield and the Tokyo Institute of Technology, simulated this very scenario and are presenting their work this week at the International Conference on Robotics and Automation.
Along with removing foreign objects, the robot could be used to perform a variety of tasks within the body, like patching wounds or delivering medicine to a specific location. The new robot builds on prior research on origami robots conducted by a team at MIT.
"It's really exciting to see our small origami robots doing something with potential important applications to health care," said researcher Daniela Rus, who also directs MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL). "For applications inside the body, we need a small, controllable, untethered robot system. It's really difficult to control and place a robot inside the body if the robot is attached to a tether."
To test the robot, the team started by purchasing a pig stomach and testing its mechanical properties. Then they built a synthetic, open cross-section of a stomach and esophagus, modeled out of silicone rubber. They used a mixture of water and lemon juice to simulate the stomach's acidic fluids.
Like prior origami robots the team has built, this one can propel itself using "stick-slip" motion, in which its appendages stick to a surface when it executes a move and then slip free when the robot flexes. It also relies on its fin-like structures to create forward thrust in the stomach fluids.
One challenge the research team faced was finding biocompatible materials with which to build the foldable robot. After testing about a dozen different materials, they settled on a type of dried pig intestine.
The next step for the research team is conducting in vivo experiments. They'd also like to add sensors to the robot and redesign it so it can control itself without external direction.