Toyota working on robots for complex situations (like household chores)

Robots have come a long way but still face incredible challenges when it comes to tasks and environments that seem pretty run-of-the-mill for humans. That's what makes the below video from Toyota Research Institute (TRI), which demonstrates robots solving complex tasks in unstructured home environments so compelling.
"Our goal is to build robotic capabilities that amplify, not replace, human abilities," said Max Bajracharya, vice president of robotics at TRI. "Training robots to understand how to operate in home environments poses special challenges because of the diversity and complexity of our homes where small tasks can add up to big challenges."
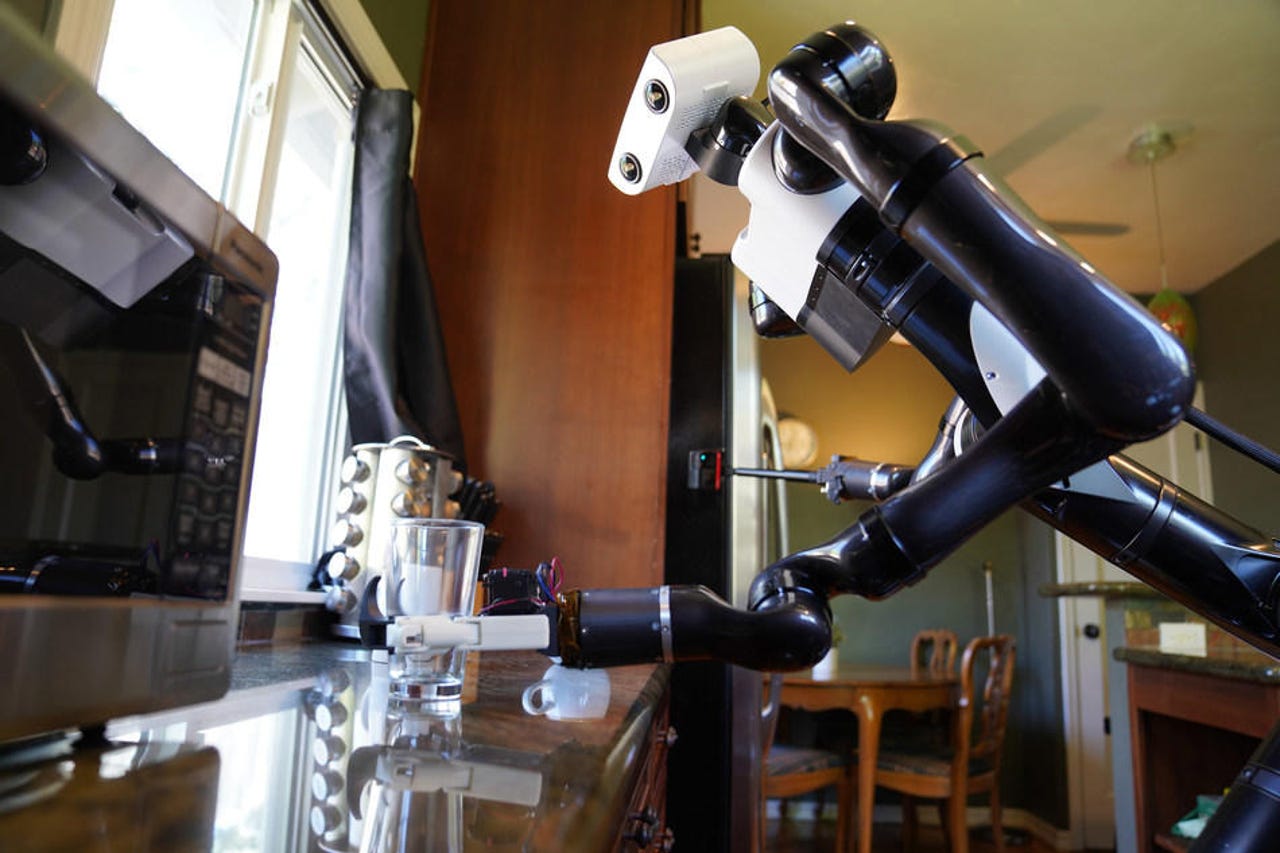
The new video, whose release coincided with National Selfie Day, is a little silly, but the advances are meaningful in the field. TRI's roboticists are here demonstrating that they've trained robots to understand and operate in situations that utterly confound most other automation systems, particularly when it comes to recognizing and responding to transparent and reflective surfaces, a major hurdle for machine vision. As a TRI statement explains, since most robots are programmed to react to the objects and geometry in front of them without considering the context of the situation, they are easily fooled by a glass table, shiny toaster or transparent cup.
To date, that's kept robots largely confined to strict task designations most commonly performed in predictable environments like factories and warehouses. Bringing robots out into the real world -- which is happening most dramatically right now in the world of autonomous vehicles -- is far more complicated, requiring these complex and potentially dangerous systems to constantly account for and confront the unexpected, which carries massive risks of failure.
"To overcome this, TRI roboticists developed a novel training method to perceive the 3D geometry of the scene while also detecting objects and surfaces," continued Bajracharya. "This combination enables researchers to use large amounts of synthetic data to train the system." Using synthetic data also alleviates the need for time-consuming, expensive, or impractical data collection and labeling.
The research is part of TRI's mission to develop active vehicle safety and automated driving technologies, robotics, and other human amplification technology. Veteran roboticist Dr Gill Pratt leads TRI.