NASA lab prepping robotic ape for DARPA challenge

The challenge was inspired by the Fukushima meltdown of 2011, which could have been avoided if a build-up of hydrogen gas in the reactor core had been vented in time. But getting into the plant and accessing the valves to vent the gas would have exposed humans to fatally high doses of radiation. Robots are great at performing individual tasks, but they tend to be highly specialized, and at that time no robotic systems existed that could perform each of a multitude of complex tasks needed to get into position and turn the valves. The DRC is largely an attempt to redress that gap, and it is part of a larger trend among technologists to deploy machines in rapid-response scenarios when human life is at risk.
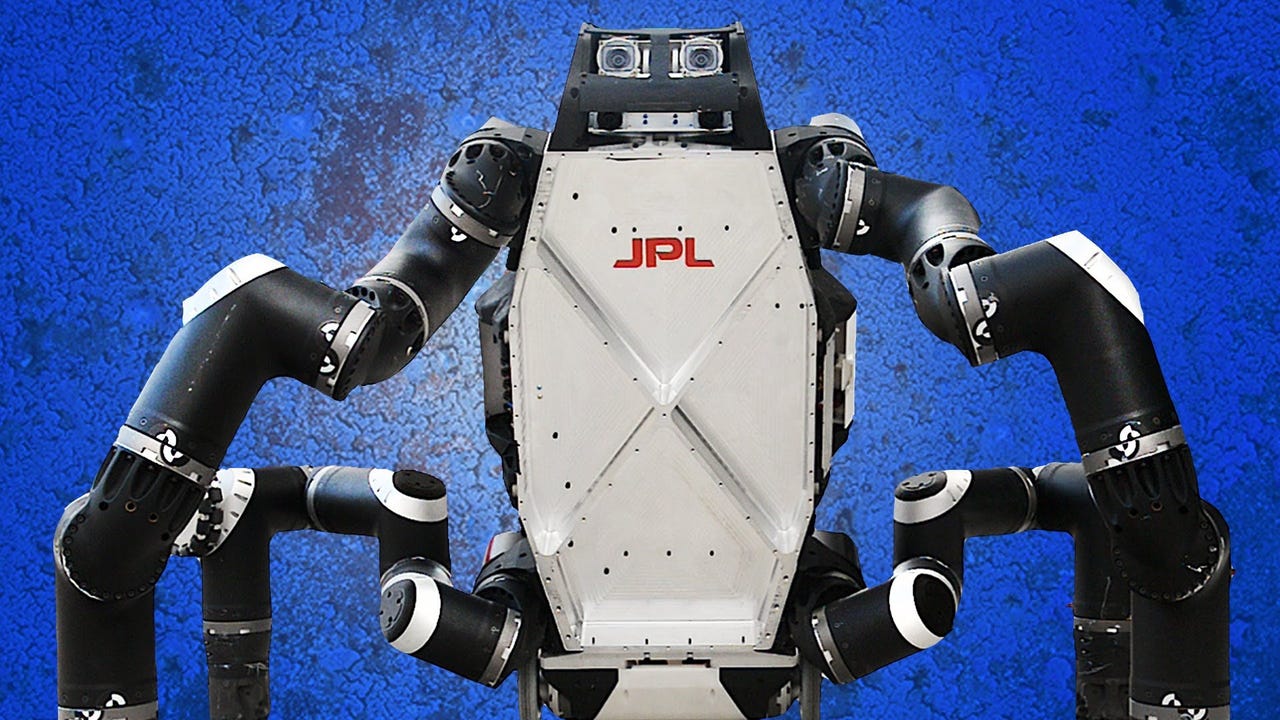
Teams are coming from as far away as Japan, but one of the most promising entrants won't have to leave the state. NASA's Jet Propulsion Laboratory, which is based in Altadena, is the home favorite, and the team is now busy prepping its disaster robot, RoboSimian, a reference to the chimpanzees whose dexterous limbs inspired the device.RoboSimian is ape-like and moves around on four limbs, a characteristic that makes it well-suited to travel over complicated terrain and climb objects. It is designed to be position agnostic, working equally well forward or backwards, right-side-up or upside-down. It has no head, and its seven sets of eyes are distributed throughout the platform.
The robot will have to perform tasks such as driving a vehicle, negotiating debris blocking a doorway, opening a valve, and cutting a hole in a wall. There will also be a surprise task. "Getting in and out of a car is the toughest thing," Brett Kennedy, the team's lead engineer, tells me. "It demands that you have command of a 3D environment." The engineers gave the robot the ability to anchor itself with one hand to improve stability while climbing into the vehicle, and they also designed it to turn off and maintain its position in hairy situations to avoid becoming unstable, giving operators a chance to assess the problem and plan their next move."Our true strength is the fact that RoboSimian can move equally well laterally and vertically," says Kennedy. "It can do true pull ups, climb ladders. So we're really gravity agnostic also."
Robotics
Each of RoboSimian's four limbs has seven degrees of freedom, and its joints provide continuous 360 degree rotation. Standing still, it looks a bit like a child's project constructed out of lengths of pipe and spare pipe elbows, but in practice that incredible range of motion allows for dexterity not found in nature, even among those dexterous primates who served as inspiration. "It allows you to approach a problem in any number of directions," explains Kennedy. "You, as a human, have one way to go, your elbow swings one way, but the robot can swing a joint in the other direction instead. That's incredibly important if you're deploying a manipulator with an obstacle in the way because you have more paths, more operational flexibility."
One of RoboSimian's biggest strengths won't be on display during the challenge itself. Unlike many of the other teams, which need a day or more to configure their robots after travel, Kennedy and his team can deploy their system in well under an hour. "We intentionally chose not to optimize certain things, and in some ways we used very boring technology--electric motors, no pumps, no calibration."
Deployability is crucial in disaster scenarios, and so is ease of use. During the DRC, RoboSimian will be operated by highly trained roboticists using a complex control interface, but the team is also developing a simplified version of the controls that limits some of the bot's functionality but will allow a layperson to be up and running in just a few minutes. That will important when the technology makes it to the field, where it can be an important tool for first responders.
The DARPA Challenge begins Friday. If you happen to be near Pomona, it's open to the public. Drop in and tell Team RoboSimian good luck.