A gentle robotic hand that won't break eggs, pasta sticks

In a testing scenario at the University of Buffalo, a robotic gripper was recently launched into a fixed object while holding a dry spaghetti stick. You would expect the impact to result in the fragile stick snapping. But this piece of pasta stayed boil-ready.
That's because the gripper detected the external force of the impact, which almost instantaneously caused magnets inside the gripper to adjust position and reduce the stiffness of the grip. The gripper absorbed the energy of impact, leaving the spaghetti stick intact.
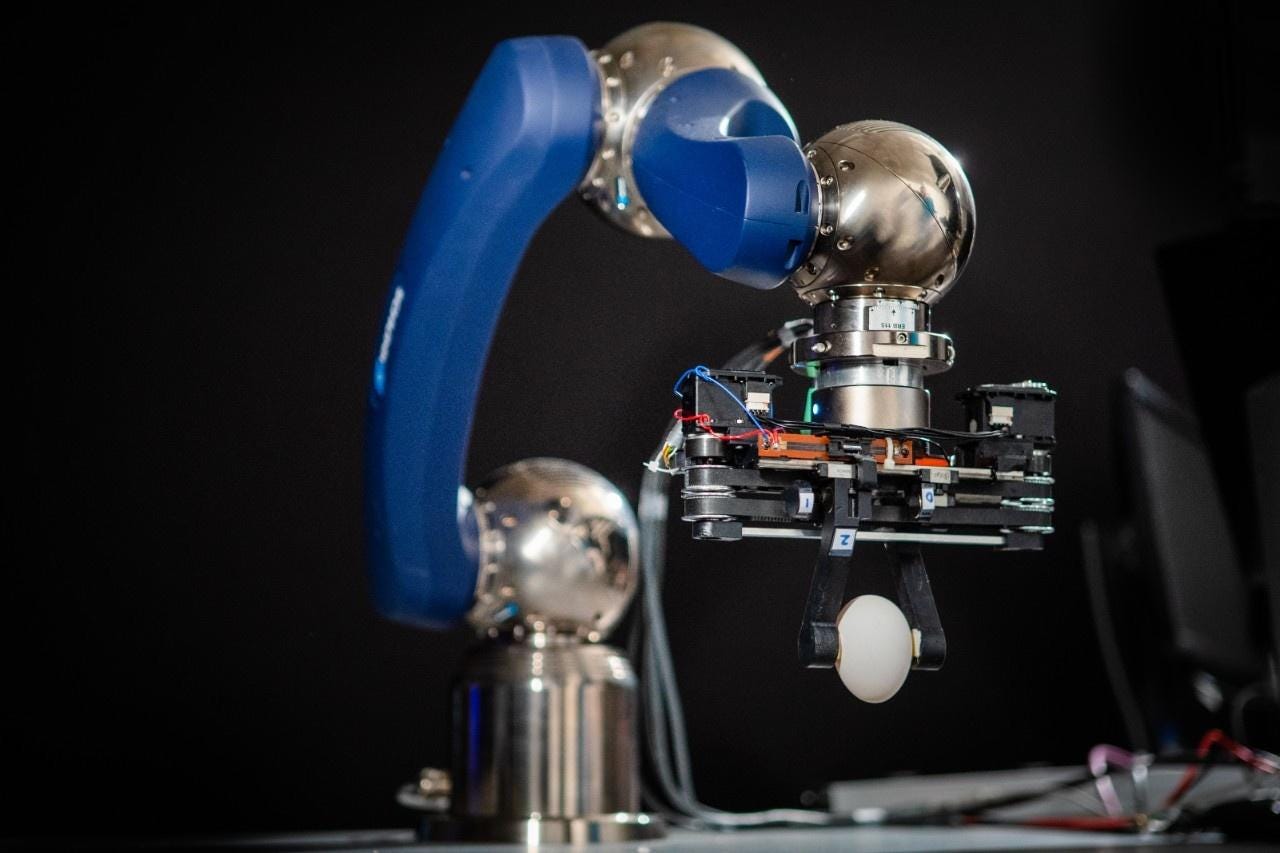
The two-finger gripper is the invention of engineers at the University of Buffalo, who have been trying to figure out how make robot hands more like human hands. The secret sauce of human object manipulation, the thing that allows us to pick up delicate objects like ripe fruit with the same meaty paws that can karate chop a wooden board, is our ability to alter the firmness of our grip.
The University of Buffalo engineers have created a two-finger robotic hand that simulates that ability, even allowing the gripper to absorb the energy of unexpected impacts without breaking the objects it carries.
"Our robotic gripper mimics the human hand's ability to adjust the stiffness of the grip," says Ehsan Esfahani, PhD, associate professor of mechanical and aerospace engineering in the UB School of Engineering and Applied Sciences. "These grippers are designed for collaborative robots that work together with people. They're going to be helpers, so they need to be safe, and variable stiffness grippers help to achieve that goal."
The mechanism behind the hand's versatile grip uses magnets. Typically, the primary robotic joint used in a finger assembly would be an actuated physical hinge. While grasping an object, the joint in such an assembly would transfer any external force applied to the hand unimpeded into the object. If we're talking about an egg, say, that results in breakage.
Instead, the Buffalo engineers gave their fingers magnetic bases. Each finger's magnetic base is positioned between two neodymium magnets that push against it, suspending the base of the finger in a cushion of air. That air becomes a kind of suspension for the finger, enabling a degree of give during a collision or at the moment of grasping. The stiffness of the grip can modified by increasing or decreasing the space between magnets.
The gripper could be especially useful in human-machine interaction scenarios in agriculture, packaging, electronics, and other light manufacturing industries. In fact, it was designed to be attached to commercially available robot arms that are already in use in many facilities, meaning adoption would be relatively straightforward in industries already using robots for some portion of their operations.
The results of the project were recently published in IEEE Transactions on Industrial Electronics in a paper that emphasizes the gripper's safety.
Esfahani is launching a startup company to commercialize the gripper after his team received $55,000 from the Buffalo Fund: Accelerator, which is funded in a collaboration between UB and Empire State Development. He says a third finger may on the way in future iterations.