Robot will crawl through pipes to help decommission nuclear facility

There are miles of pipes at a closed uranium enrichment plant in Piketon, Ohio, that no living creature can safely enter.
So DOE will use a couple custom robots.
Robots have found an important calling working in radioactive environments. In the wake of the Fukushima disaster, teams of Japanese roboticists have created a small army of robots capable of surviving, if only for a few minutes, inside the compromised reactor cores.
One of those robots recently transmitted the first photos of nuclear debris from the site.
The job of helping decommission the Piketon facility, which is operated by the Department of Energy and has been closed since 2000, will fall to a pair of customized autonomous robots developed at the Robotics Institute at Carnegie Mellon University.
Specifically, the autonomous robots will be used to identify uranium deposits on pipe walls.
That work has previously fallen to humans working on scaffolding outside the pipes. Due to the sensitive nature and inherent health risks of the work, it's a costly endeavor.
DOE officials estimate the robots could save tens of millions of dollars at Piketon, and save perhaps $50 million at a similar uranium enrichment plant in Paducah, Kentucky.
"This will transform the way measurements of uranium deposits are made from now on," says William "Red" Whittaker, robotics professor and director of the Field Robotics Center at CMU.
Also: Disaster robots slow to gain acceptance from responders
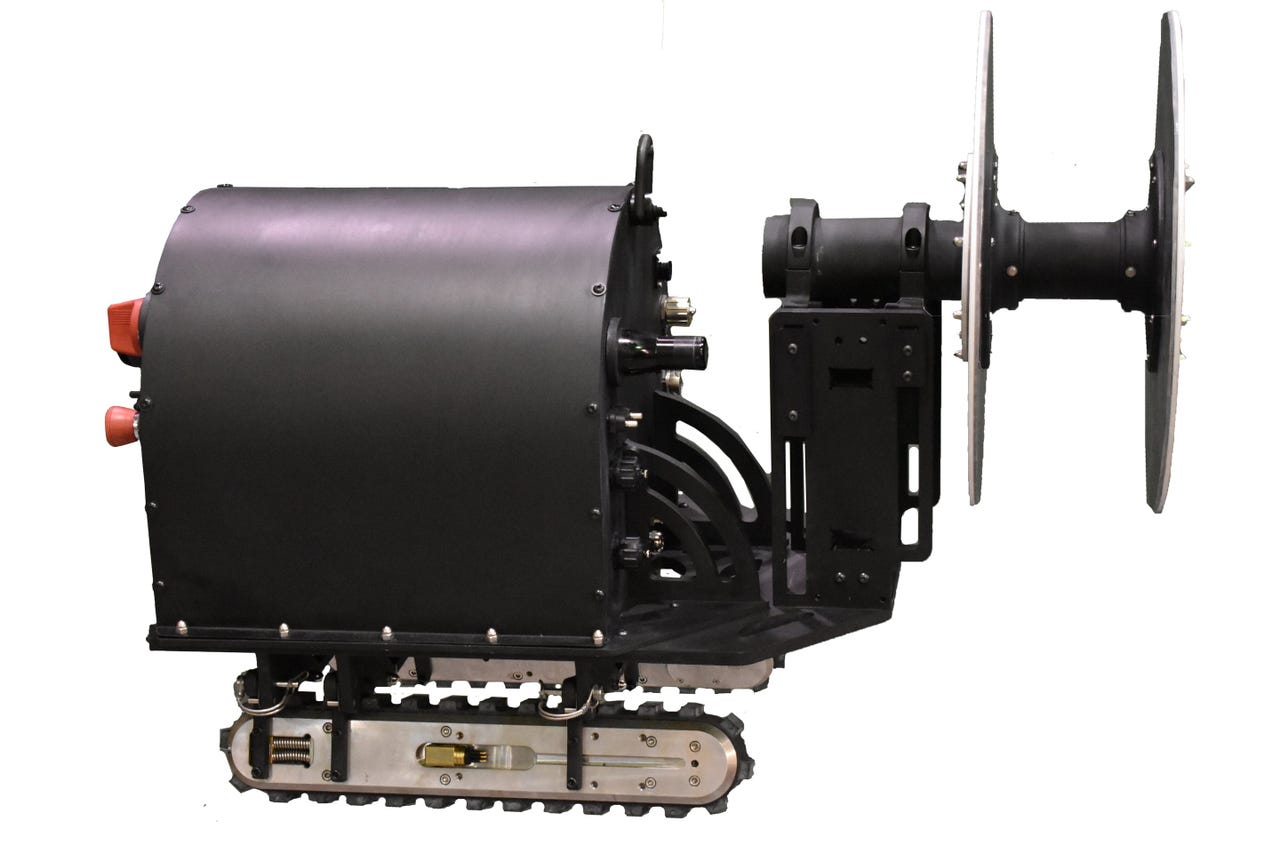
The tetherless robot he helped developed is called RadPiper. It will maneuver through pipes 30 inches and greater in diameter atop flexible tracks.
Like many driverless cars, the robot is equipped with a LiDAR as well as a fisheye camera to detect and maneuver around obstacles, such as closed valves.
RadPiper measures radioactivity with a "disc-collimated sensing instrument" that uses a sodium iodide sensor to count gamma rays.
Like a post-apocalyptic Roomba, it returns to its launch point after navigating each section of pipe.
DOE has paid CMU $1.4 million to develop the robots as part of what Carnegie Mellon calls the Pipe Crawling Activity Measurement System.
It's a great example of laboratory robotics making it into the real world -- a process that's proven particularly slow when it comes to bringing robotics developed by grad school researchers to commercial markets.