Researchers develop micro-robot

A flying micro-robot has been developed by researchers at the University of Waterloo in Ontario.
A research team lead by professor Mir Behrad Khamesee manipulated magnetic fields to levitate and move a robot weighing less than one gram around three axes, according to a paper seen by ZDNet UK — MechMN: Design and Implementation of a Micromanipulation System using a Magnetically Levitated MEMS Robot.
An array of electromagnets is used to create a three-dimensional parabolic magnetic field. The robot is magnetized itself and sits on top of the parabola, supported by the interaction between its own magnetic field and that created by the electromagnets. Altering the flow of current in the electromagnet distorts the field and moves the robot, Khamesee told ZDNet UK in an email interview on Thursday.
"We develop a focal point of a magnetic field in space, which the microrobot hangs on," wrote Khamesee. "By changing the location of the focal point (through current control in several coils), the micro-robot is consequently moved."
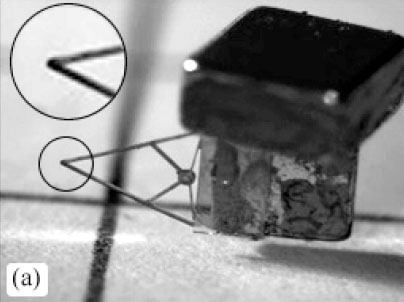
The micro-robot has pincers which can be opened by heating them with a laser. When the laser is turned off, the pincers cool and close. Lasers are also used to detect the position of the robot, Khamesee said. "There are three sets of laser sensors for detecting the position of the microrobot in three-dimensional space. The robot is an obstacle for the laser beam in space, and its position can be read."
The robot is monitored by the laser sensors and a camera, which create a feed-back loop to a computer. When the robot grasps an object, the magnetic field is automatically adjusted so the robot can maintain its position while supporting the weight of the object.
Khamesee wrote that the micro-robot could be used in clean rooms or hazardous environments.
"Since there is no wiring, and the robot freely floats in air, it can operate in an enclosed chamber while the whole setup is outside," wrote Khamesee. "It can work in hazardous environments, toxic chambers, and it can be used to conduct bio-hazardous experiments. Also, since there is no mechanical linkage, it has a dust-free operation, suitable for clean room applications."
The research team, which includes Khamesee and graduate students Caglar Elbuken and Mustafa Yavuz, submitted the paper to the Institute of Electrical and Electronics Engineers and the American Society of Mechanical Engineers for consideration for publication in September last year.
This article was originally posted on ZDNet UK.