Meet SIMbot: Electronics make this robot glide on a ball

Instead of mechanics, the motor relies on electronics and software, so the only moving parts are the ball and the robot's body.
Streamlining a robot's design can cut back on maintenance and repairs by eliminating any extra parts that could break. Even better, transitioning from mechanical to electronic parts simplifies design and could also save money. "Electronics and software are getting cheaper every year, but mechanical things are not," Ralph Hollis, a research professor in Carnegie Mellon University's Robotics Institute, tells ZDNet.
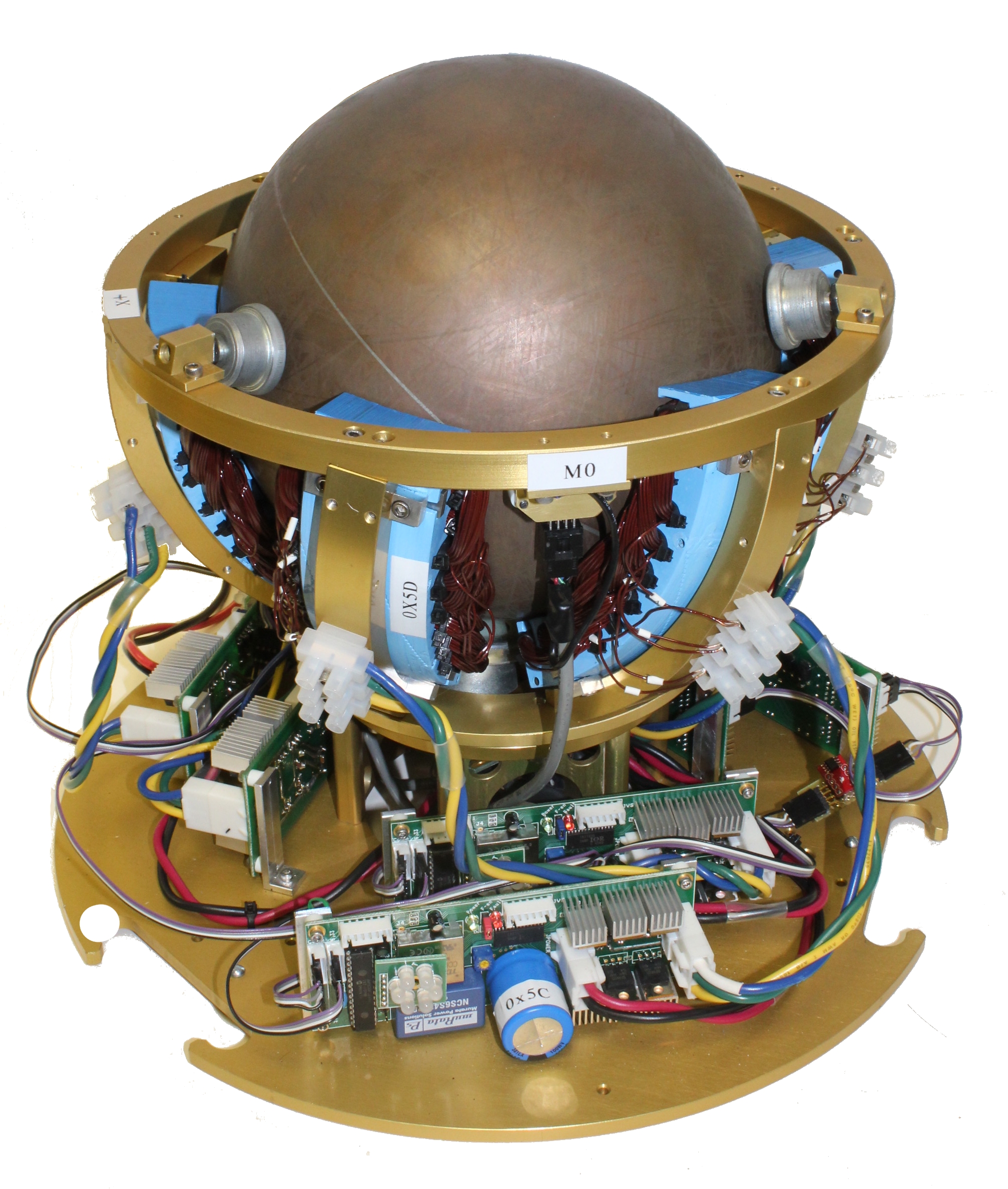
Hollis invented the ballbot, a robot that moves more gracefully than most machines, since its body glides along a single ball. Now, more than a decade after its debut, the ballbot is getting an upgrade. Hollis partnered with Masaaki Kumagai, a professor of engineering at Tohoku Gakuin University in Japan, to create a spherical induction motor (SIM).
The new robot, called SIMbot, is even more elegant than the original because it eliminates mechanical drive systems. Instead of mechanics, the new robot relies on electronics and software, so the only moving parts are the ball and the robot's body.
The original ballbot operated similarly to an old-school mechanical computer mouse, with four motors that pushed rollers against the ball to change its direction. The belts would naturally wear out and need to be replaced, which then meant the whole robot had to be recalibrated. The new version uses an induction motor with a unique spherical rotor and complex algorithms for control. This enables the motor to completely spin the ball in any direction, rather than just moving it back and forth a few degrees. This means the SIMbot can move freely using only electronic controls.
Since ballbots can be very slim and tall, they have been used for by large retail stores for inventory management. The robots slide between aisles of shelves, taking high-resolution video that can be used to count and analyze stock. Now, there are even more potential applications for the lanky robot.
SIMbot is ideal for working alongside humans, because if it accidentally bumps into something (or someone), it will softly bounce off. Hollis says, "It's omnidirectional and it's what we call compliant -- even though the robot may be heavy, you can push on it with a single finger and it will yield in any direction."
Hollis's team at Carnegie Mellon is conducting experiments to see if it SIMbot could guide people by hand through a building. It could assist people who are elderly, sight-impaired, or just anyone who needs help navigating through an unfamiliar place, such as a store or an airport.
SIMbots are so graceful that they could also be used simply for entertainment. Hollis says, "Because of the dynamic agility, they're pretty fascinating to watch - they have a smooth and almost dance-like motion."
Logic and past experience could lead the researchers to assume that simplifying design will automatically make the robot more durable, but Hollis maintains an admirable amount of skepticism. "One would think so, but that remains to be seen," he says. "I'm a scientist, so I need proof of everything."